
Robotic Manipulator Arm
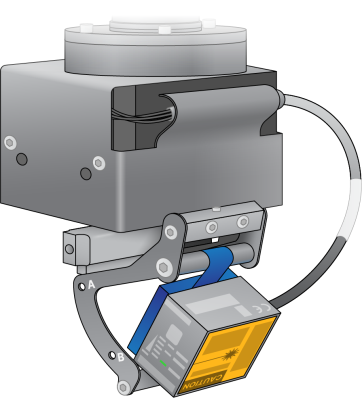
The robotic manipulator arm (RoMa) uses a dual (A/B) bracket barcode scanner to scan items positioned on the instrument work table. Data transmission between the instrument software and the barcode scanner occurs through the RoMa arm cable. This scanner is capable of reading and identifying plate and BeadChip barcodes placed on the instrument worktable or within the Te-Flow chamber rack. The information derived from scanned barcodes is traceable in ILASS and within a Laboratory Information Management System (LIMS).
RoMa with Barcode Scanner
For workflows conducted on the IAPS with ILASS, the RoMa adheres to a standard coordinate system featuring four axes:
| • | X-axis—Linear movement of robotic arm from left to right across the worktable. |
| • | Y-axis—Linear movement of robotic arm from front to back across the worktable. |
| • | Z-axis—Linear vertical movement up and down above the worktable. |
| • | R-axis—Rotational movements. |
